Jump to: Navigation
Navigation Among Crowd - DEEP-RL - (Master 2)
The following project refers to the results of a Master 2 work, investing different Deep-RL methods to help robot to navigate among Crowd.
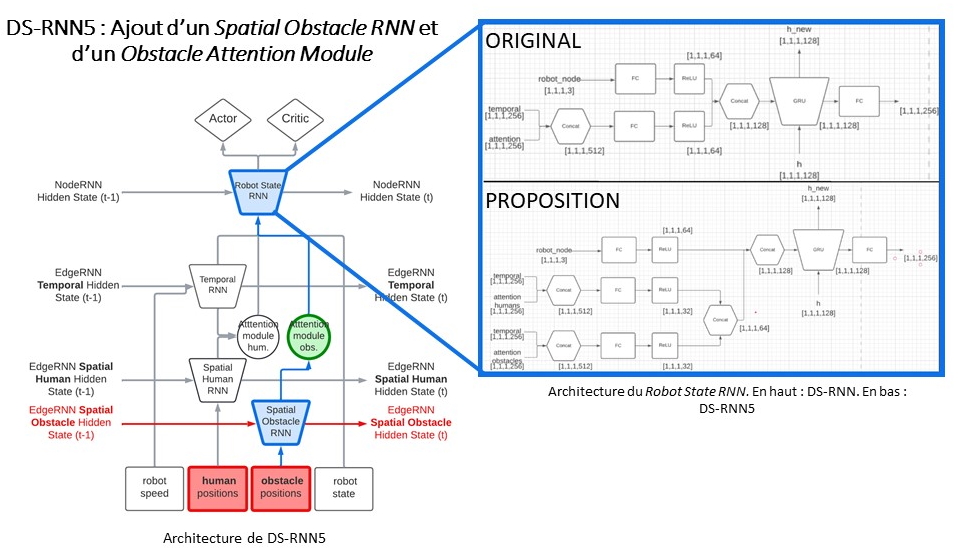
The following works compare different crowd navigation strategies. The work focuses on Deep-RL technics. To do so the crowNav simulator has been used and some improvements made to add more realistic hypotheses. The DS-RNN deep-RL has been used as baseline and improve to fit new conditions.