Jump to: Navigation
Project Description
 Simulation and Prediction of Human Flows in Hospital Environments from Assistive Robot Observations
Simulation and Prediction of Human Flows in Hospital Environments from Assistive Robot Observations This paper introduces a framework for predicting individual motion patterns in hospitals by extending the Flowgrid model to account for specific agent roles and temporal rhythms. Utilizing the BePed simulator, the system enables multi-robot teams to navigate socially by distinguishing between the movement behaviors of doctors, nurses, and patients.
[en]
- NAMOROS a ROS 2 Package for Navigation Among Movable Obstacles
NAMOROS is a ROS 2 package addressing the problem of Navigation Among Movable Obstacles (NAMO). It enables mobile robots to plan and execute navigation tasks in environments where certain obstacles can be grasped and relocated.
[en]
 Enhanced Navigation ROS2-Nav2 using MPPI and Spatio-Temporal Voxel Layed
Enhanced Navigation ROS2-Nav2 using MPPI and Spatio-Temporal Voxel Layed Enhanced Navigation using ROS-2 - Nav2 with laser Obstacle layer (global and local costmap), Spatio-Temporal Voxel Layer (global and local costmap), MPPI Controller (PMB-2 Pal mobile based)
[en]
 New Particle Filter Tools for training
New Particle Filter Tools for training New Particles filter simulator for training, including 2d particles filter, parameter cusomization, ray tracing
[en]

- IROS 2024 - Multi-Robot Navigation Among Movable Obstacles - Implicit Coordination to Deal with Conflicts and Deadlocks
How to find efficient paths for multiple robots in modifiable cluttered environments? This question leads us to formulate the new problem of Multi-Robot Navigation Among Movable Obstacles (MR-NAMO). In MR-NAMO, robots must not only plan for the possibility of displacing obstacles as needed to facilitate their navigation, but also solve conflicts that may arise when trying to simultaneously access a location or obstacle...
[en]
- AAMAS 2024 - Attention Graph for Multi-Robot Social Navigation with Deep Reinforcement Learning
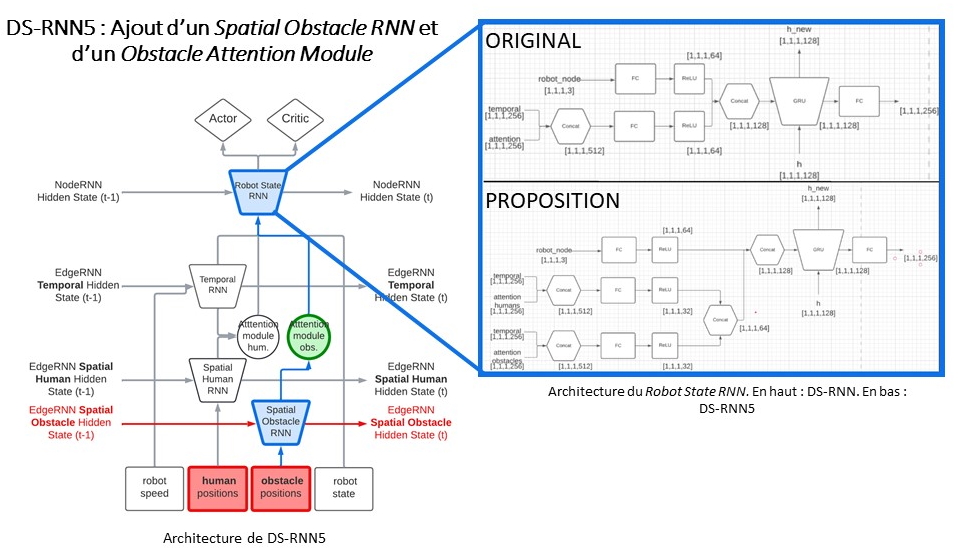
Learning robot navigation strategies among pedes- trian is crucial for domain based applications. Combining perception, planning and prediction allows us to model the interactions between robots and pedestrians, resulting in im- pressive outcomes especially with recent approaches based on deep reinforcement learning (RL). However, these works do not consider multi-robot scenarios. In this paper, we present MultiSoc, a new method for learning multi-agent socially aware navigation strategies using RL. Inspired by recent works on multi-agent deep RL, our method leverages graph-based representation of agent interactions, combining the positions and fields of view of entities (pedestrians and agents). Each agent uses a model based on two Graph Neural Network combined with attention mechanisms...
[en]

- RCS 2023 - Human Presence Probability Map (HPP) a Probability propagation based on Human Flow Grid
Personal assistance, delivery services, and crowd navigation through robots fleet are complex activities that involve human-robot interaction and fleet coordination. Human location estimation is one of the key factors in assisting robots in their tasks. This paper proposes an efficient process for propagating human presence Probability based on partial observation of humans by the robot fleet...
[en]
- Navigation Among Crowd - DEEP-RL - (Master 2)
The following project refers to the results of a Master 2 work, investing different Deep-RL methods to help robot to navigate among Crowd.
[fr]
- Navigation Local Planner tutorial
The following project refers to a tutorial on local planner, DWA is studied and different configurations are tested on environment containing known and unknown obstacles.
[en]
- Robocup, OPL and SSPL competition results
The following video shows the result of the LyonTech Robocup team in the RoboCup@Home international competition in both OPL (Open Plateform League) and SSPL (Social Standard Plateform League)
[en]
- Robocup, Manage spatial information
The following repository provides a set of tools to manage spatial information into a Postgis DB. Collected bounding boxes are converted into 3d points (PCL) and clustered using a DBSCAN (x,y,z,category). Clusters are them registered into Postgis DB. More information here https://github.com/jacques-saraydaryan/ros_world_mng/tree/dev_palbator_postgis_js
[en]
- IROS 2020, S-NAMO
Publication of Benoit Renault in the IROS International conference, NAMO (NavigationAmong Movable Obstacles) is a domain where robots move objets in order to reach their objectives.This paper, Modeling a Social Placement Cost to Extend NavigationAmong Movable Obstacles (NAMO) Algorithms, intends to optimize object placement choices regarding some social constraints (not in the middle, narrow is worth, not breaking room connectivity).
[en]
- Robotic Tutorial, Particle filter
The following repository provides a tutorial work on using a particle filter for robot localization. Here a simple plane simulation is used to manipulate particle filter. more information here https://github.com/jacques-saraydaryan/particles_filter_plane_simulator_student
[en]
- RoboCup@Home 2020 - TDP OpenPlateform
Lyontech team will participate to the RoboCup@Home 2020 in the league OpenPlateforme, the following video shows the team and robot capacity needed for the qualification process. More information is available [here](https://robocup-lyontech.github.io/opl/)
[en]
- Ros Tutorial, Navigation stack
The following repository provides a tutorial of the ros navigation stack configuration, including inflate layer, obstacle layer, 3d obsctacle detection, local and global costmap. https://github.com/jacques-saraydaryan/training-turtlebot-simulator-student
[en]
- RoboCup@Home 2019 - Take Out The Garbage
This video shows the final run of the Take out the garbage scenario during the RoboCup@Home 2019 competition Work was done with the [LyonTech RoboCup Team](https://robocup-lyontech.github.io/)
[en]
- RoboCup@Home 2019 - People Management
Creation of a framework helping to recognize people identity, pose and to track people into 3d space. Current work is based on the 2d RGB pepper camera. Work was done with Raphael Leber and Fabrice Jumel
[fr]
- Indirect people pheromone
Work in progress, add pheromone on people location when detected by robot. Pheromone when spreads follow human flow registered by robot
[fr]
- Potential Fields and Wave propagation
Create a Ros Package building virtual potential fields according occupancy map. User can add objective creating associated attrative fields (wave front propagation)
[fr]
- RoboCup@Home 2018
Demonstration of managing perception information and object localisation in 3D using rgbd camera. Using mobilenet-ssd for object detection and ros wire for multiple objects tracking
[fr]
- Ros Tutorial, Understanding Path Finding A Star
The following repository provides a tutorial for understanding short path computation under occupancy grid. More information is available here https://github.com/jacques-saraydaryan/global_planner_short_path_student
[en]
- Navigate Through Human Flow
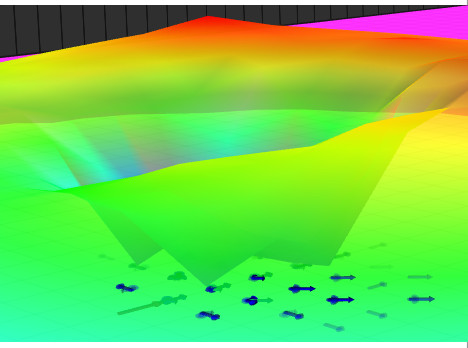
This video shows 3 navigation strategies based on the A* Short path planner. In this scenario 200 people cross 3 corridors and a robot plan round trip between 2 points. 3 Algorithms are presented, A*, A* affordence map based (human presence likehood) and A* Flow grid based (human orientation estimation).
[en]
- Robots Deliver Service to Moving People - Individual vs. Group Patrolling Strategies
First proposition of strategies for robot service delivery. Robots need to coordinate their work to optimize service delivery to moving people.
[en]